Help Piperbot and Pip navigate their way down a treacherous canyon in this console game you code, using your controller to play.
The Commander sends word—Piperbot and Pip are approaching the edge of a steep Martian canyon! With the help of the Scientists, you’ll build a game-like model to visualize the canyon walls. Use your controller to guide them down safely and bring your code to life.
View student interface at make.playpiper.com Computer with USB port and Chrome or Edge browser
Computer with USB port and Chrome or Edge browser
 Piper Make Base Station or Starter Kit
Piper Make Base Station or Starter Kit
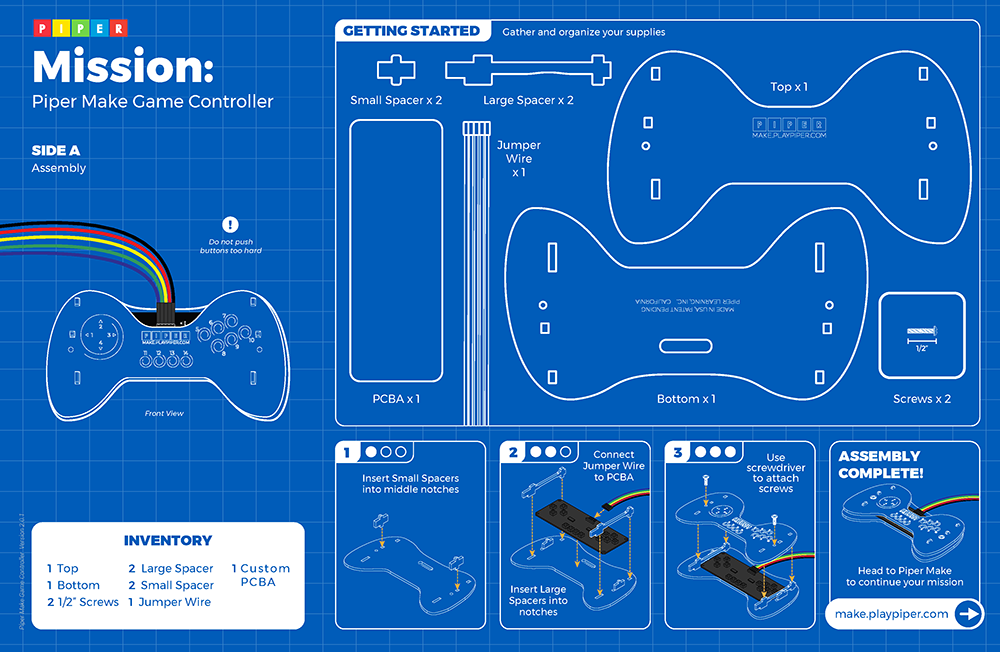
 Piper Make Game Controller
Piper Make Game Controller