Program your Controller buttons to drive your Rover forward, backward, and turn on command.
The Mars Race continues, and it’s time to take control—literally! In this mission, Piperbot uses the Game Controller to steer the Rover. Code each button to move the robot and prepare for action on the Martian track!
View student interface at make.playpiper.com Computer with USB port and Chrome or Edge browser
Computer with USB port and Chrome or Edge browser
 Piper Make Base Station or Starter Kit
Piper Make Base Station or Starter Kit
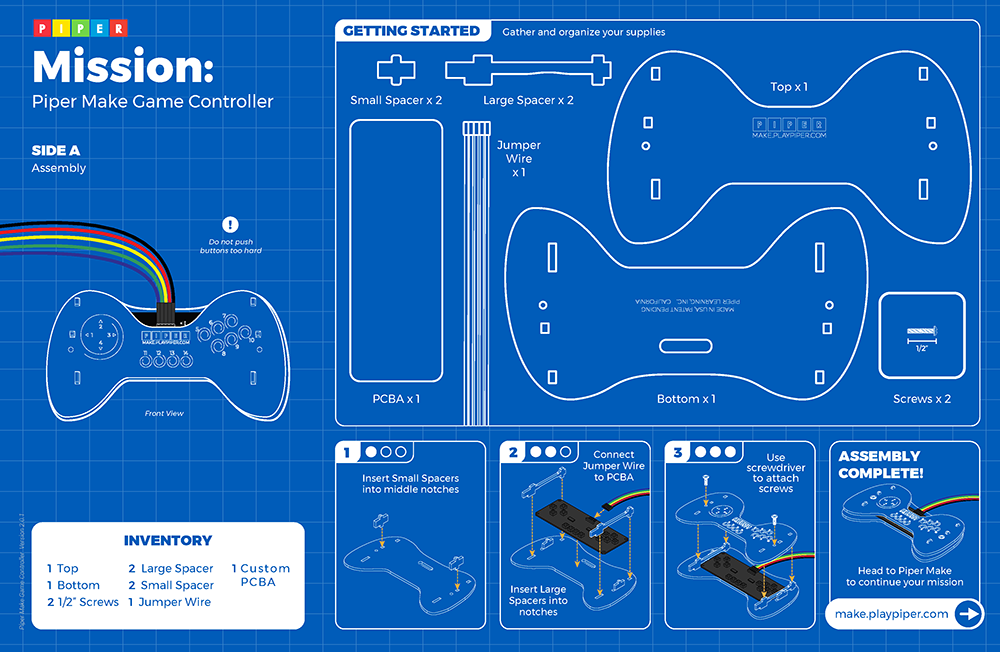
 Piper Make Game Controller
Piper Make Game Controller
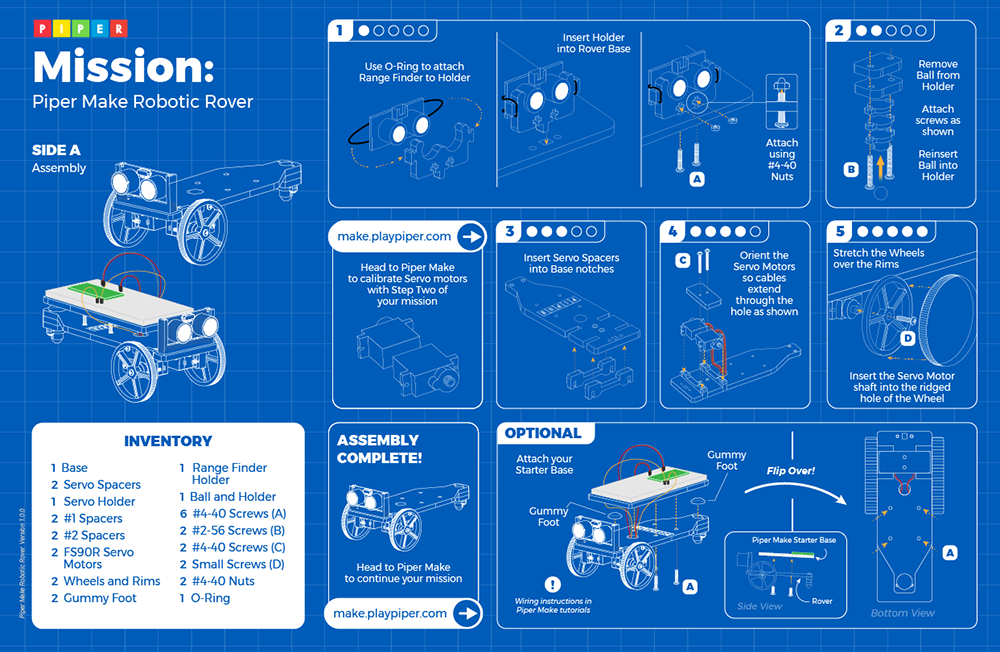
 Piper Make Robotic Walker
Piper Make Robotic Walker