Build a controller to steer your Walker using buttons—code it to follow your commands in real time!
Walker’s steps feel a little off, so we work with Pip and Piperbot to smooth out the movement. With the right code, we help Walker stride with confidence across the Martian surface.
View student interface at make.playpiper.com Computer with USB port and Chrome or Edge browser
Computer with USB port and Chrome or Edge browser
 Piper Make Base Station or Starter Kit
Piper Make Base Station or Starter Kit
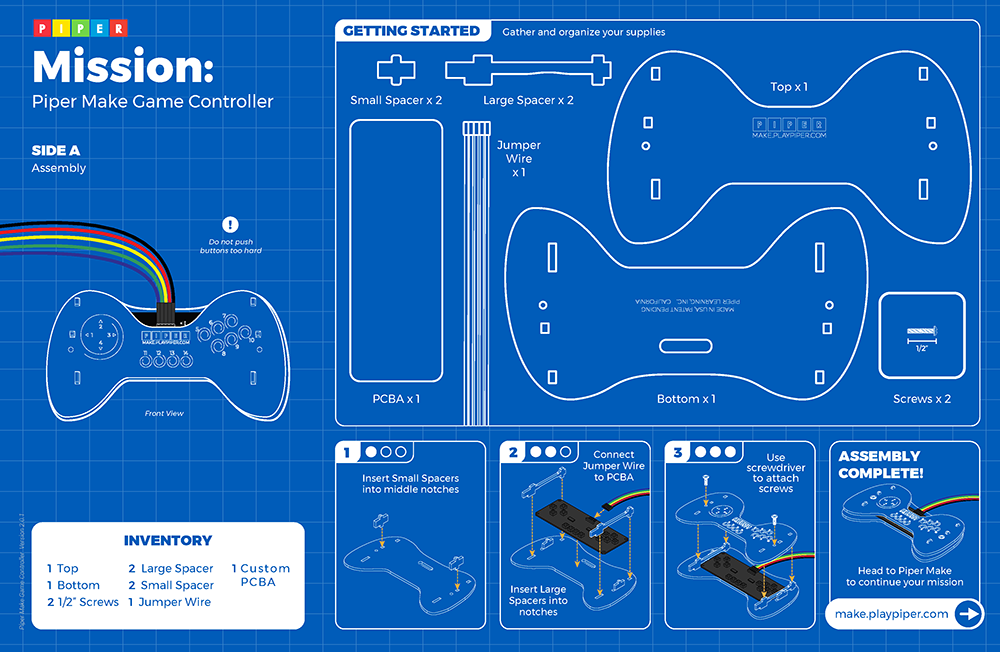
 Piper Make Game Controller
Piper Make Game Controller
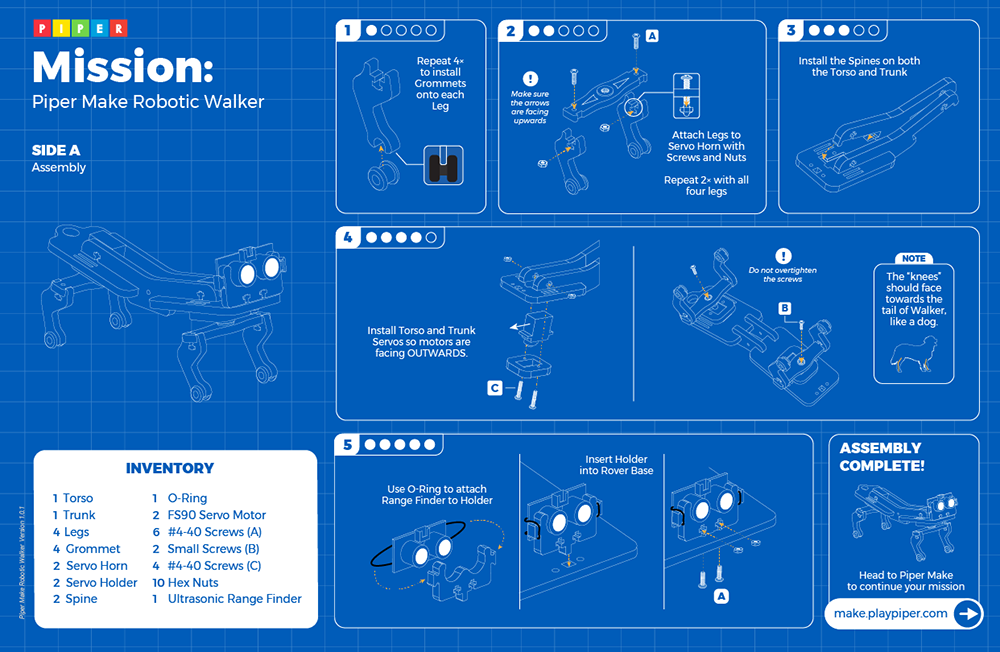
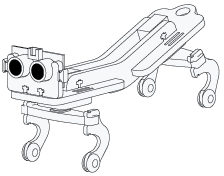 Piper Make Robotic Walker
Piper Make Robotic Walker