Learn to use sensors as a variable input to steer the Robotic Rover.
Piperbot is too scared to look! Instead of using code to steer our Rover, you will use the Ultrasonic Range Finder as a distance measurement tool to drive the robot.
Have an different version? Look for more information on the Support Page.
Troubleshooting Tips
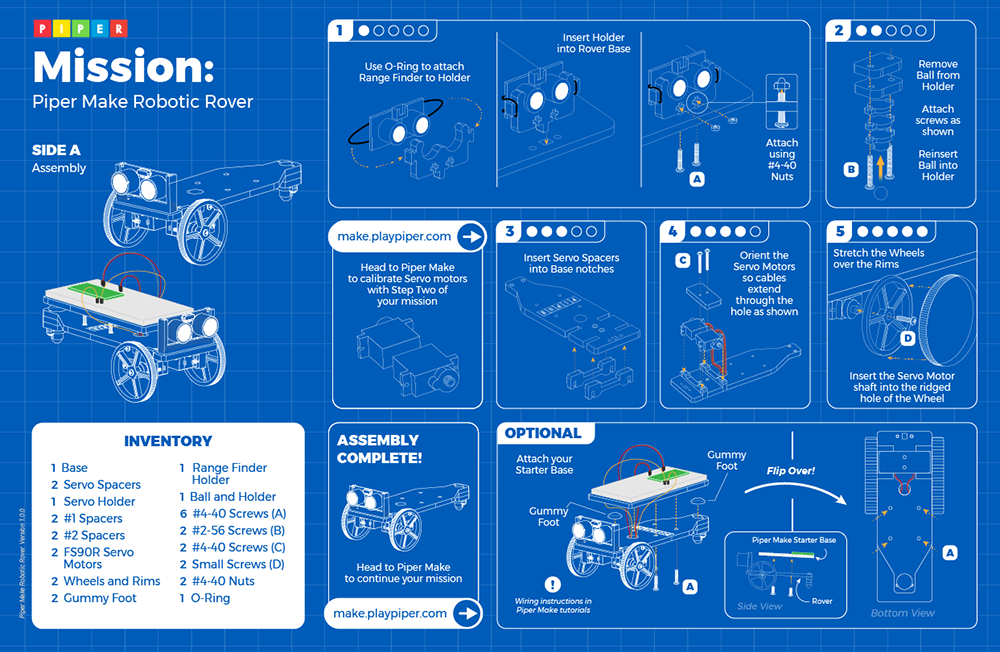
When do I calibrate my servos?
Calibrate your servos before you assemble the Rover. If it is already assembled, you can easily remove the servos by taking out the bottom 2 screws on the Rover.
Are your servos failing to turn or move?
Verify all your electrical connections, including that your Pico is connected to your computer.
It is common to be off by 1 or 2 holes in the connections. We recommend going through each build to make sure the connections are correct.
Are the servos moving or not moving in the way you expect?
If so, then adjust the screw on the back by tiny amounts until they stop moving.
Do you have fewer Jumper Wires of the same color than is presented in the diagram?
This is okay. Jumper Wires can all be used interchangeably.
Does the Rover move backward compared to the desired outcome?
Ensure the wires plugged into GP0 and GP1 are not swapped.
Are you unable to find pin 22 when using the range finder block?
Be sure you’ve scrolled to the bottom of the dropdown menu.
Our customer support specialists are on hand to ensure your implementation of Piper runs seamlessly. View Support Docs or Contact Support
EXPANDED RESOURCES
Term Glossary
Robot A device that can execute a task independently of direct human control or activity.
Feedback Sensors Instruments that robots can use to make adjustments based on their readings.
Servo Motor Self-contained electric devices that precisely rotate or push machine parts.
Autonomous Vehicle A vehicle that can operate without direct human control, usually through a built-in autopilot system.
Bionics When we use biological systems (e.g., dogs, humans) to develop and design new robots.
 Computer with USB port and Chrome or Edge browser
Computer with USB port and Chrome or Edge browser
 Piper Make Base Station or Starter Kit
Piper Make Base Station or Starter Kit
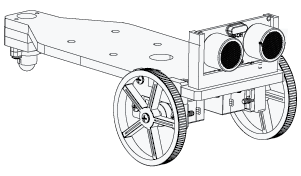 Piper Make Rover
Piper Make Rover
 Robotics Engineer: Salary $104,600/yr
Robotics Engineer: Salary $104,600/yr
 Automotive Engineer: Salary $95,300/yr
Automotive Engineer: Salary $95,300/yr
 Civil Engineer: Salary $88,050/yr
Civil Engineer: Salary $88,050/yr
 Electro-Mechanical and Mechtronics Technicians: Salary $60,570/yr
Electro-Mechanical and Mechtronics Technicians: Salary $60,570/yr