Learn how to use feedback sensors to send commands to your robot.
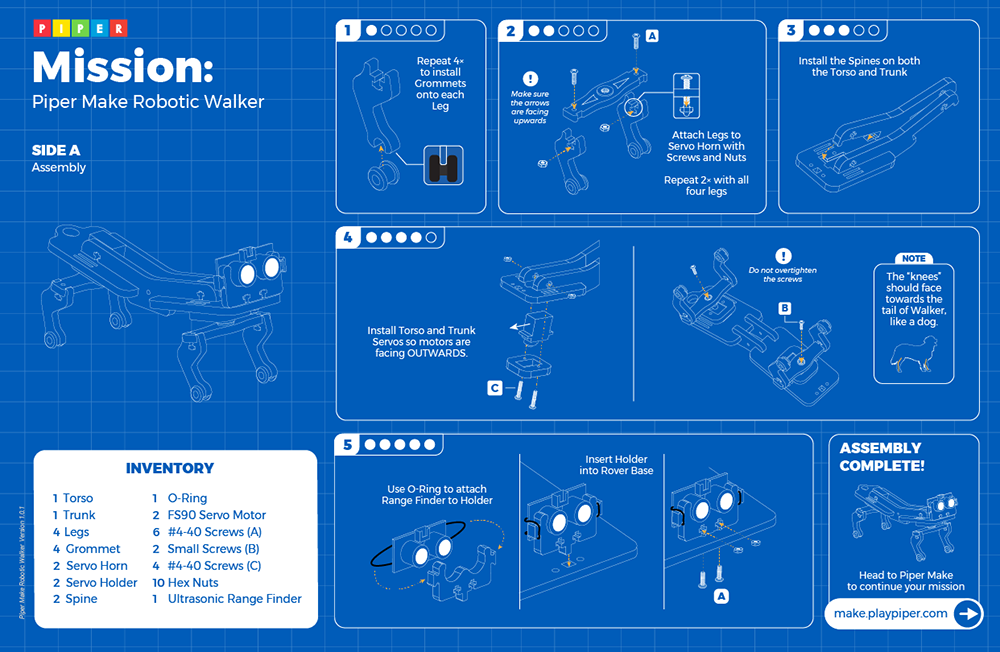
And last up, it’s time for final judging. In this mission, you’ll make sure Walker doesn’t walk into the judging table by using the Ultrasonic Range Finder to detect when it’s up against an obstacle.
View student interface at make.playpiper.com Computer with USB port and Chrome or Edge browser
Computer with USB port and Chrome or Edge browser
 Piper Make Base Station or Starter Kit
Piper Make Base Station or Starter Kit
 Piper Make Walker
Piper Make Walker
The following sections will contain step by step instructions for ELA, ELD and Math extensions directly related to this mission. Adjust the directions to fit your ELA, ELD and Math standards.
ELA Extension:Math Extension: Detective Walker Pair students up or allow them to choose a partner. Students will connect time back to previous knowledge of fractions/decimals, or use this to introduce it.
 Robotics Engineer: Salary $104,600/yr
Robotics Engineer: Salary $104,600/yr
 Automotive Engineer: Salary $95,300/yr
Automotive Engineer: Salary $95,300/yr
 Civil Engineer: Salary $88,050/yr
Civil Engineer: Salary $88,050/yr
 Electro-Mechanical and Mechtronics Technicians: Salary $60,570/yr
Electro-Mechanical and Mechtronics Technicians: Salary $60,570/yr
Robot A device that can execute a task independently of direct human control or activity.
Feedback Sensors Instruments that robots can use to make adjustments based on their readings.
Servo Motor Self-contained electric devices that precisely rotate or push machine parts.
Autonomous Vehicle A vehicle that can operate without direct human control, usually through a built-in autopilot system.
Bionics When we use biological systems (e.g., dogs, humans) to develop and design new robots.
