Learn to use servo motors as an output by programming them to turn to specific angles.
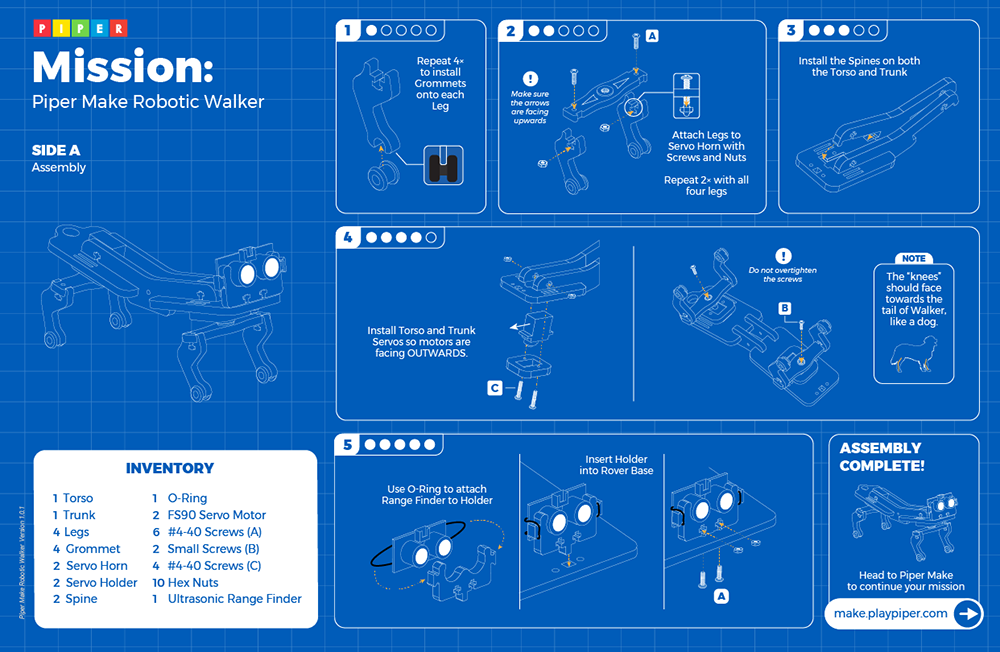
Piperbot and Pip have created a pretty convincing robot to enter the Mars Creature Race for the Cause. Now it’s time to put it to the test! In Event 1, you will build and code the Walker, a quadruped robot, to walk (and run!) like a dog.
Students will gain a real-world understanding and application of how angles work.
Students will understand trajectory and how it is related to the modification of an angle.
Students will understand what a servo motor is and how to program one so it moves a robot.
Students will understand the need for precision when applying a modification to an angle, thus changing the trajectory.
Students will reinforce their knowledge of a loop in programming.
Learning Activities
The following sections will contain step by step instructions for ELA, ELD and Math extensions directly related to this mission. Adjust the directions to fit your ELA, ELD and Math standards.
ELA Extension: Walker Race Narrative
Have students work independently to write a one-, three-, or five-paragraph story about their robot entering a race, based on grade-level standards.
Create a unique writing situation where the teacher randomly chooses students to have their robot win or lose, allowing them to write about a situation they may not be used to or find difficult.
Ensure students include details: the name of their robot, where the competition is happening, etc.
If students are inspired and want to write beyond one paragraph, let them run wild!
Ask students to share their story with two other students for feedback and then make the appropriate changes.
Add a dash of art into this activity by giving the option to draw their robot during the dancing competition, winning, losing, etc.
Bonus points if the students incorporate each vocabulary word: function, logic, loops, variable.
ELD Extension: Winning and Losing
Pair students up so that one English Learner (EL) works with one other student who is a non-EL or a higher-level EL.
They will start by sharing with their partner, via an oral retelling, of a time they either won or lost, which should differ from the story they wrote about.
The teacher or students can decide which story to tell: a loss or a win.
The listening partner will need to take notes to remember key moments of the story and work towards retelling it as accurately as possible.
Students will then go up in pairs to retell their partner’s story, with the partner grading them on how accurate they were.
Math Extension: What is an Angle?
Pair students together or allow them to choose their partners.
Partner A will be rotating; Partner B will oversee rotating Partner A. They will eventually switch roles.
Connect back to the Walker Race activity and ask them to describe an angle in their own words.
Collect these descriptions on the board or a doc to display.
Start students off by having them rotate their partner with easy-to-use angles: 45, 90, 180, 360.
Have pairs switch roles and move on to angles that are a little more difficult to work with, such as 30, 60, 120, 150, etc.
Observe how students have rotated their partners each time and ask them to explain their reasoning.
Finally, ask students to decide which role they want, the partner being rotated or the one doing the rotating.
Career Connections
Robotics Engineer: Salary $104,600/yr
Automotive Engineer: Salary $95,300/yr
Civil Engineer: Salary $88,050/yr
Electro-Mechanical and Mechtronics Technicians: Salary $60,570/yr
 Computer with USB port and Chrome or Edge browser
Computer with USB port and Chrome or Edge browser
 Piper Make Base Station or Starter Kit
Piper Make Base Station or Starter Kit
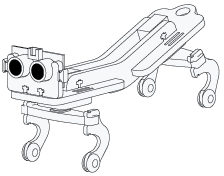 Piper Make Walker
Piper Make Walker
 Robotics Engineer: Salary $104,600/yr
Robotics Engineer: Salary $104,600/yr
 Automotive Engineer: Salary $95,300/yr
Automotive Engineer: Salary $95,300/yr
 Civil Engineer: Salary $88,050/yr
Civil Engineer: Salary $88,050/yr
 Electro-Mechanical and Mechtronics Technicians: Salary $60,570/yr
Electro-Mechanical and Mechtronics Technicians: Salary $60,570/yr