Students will reinforce their understanding of a function in programming and how one is used to move a robot.
Students will reinforce their understanding of wait times in programming and how they are used to determine how a robot moves.
Students will reinforce their understanding of angles and how they are used to affect a robot’s movement.
Students will understand how changing an angle affects the trajectory of an object.
Learning Activities
The following sections will contain step by step instructions for ELA, ELD and Math extensions directly related to this mission. Adjust the directions to fit your ELA, ELD and Math standards.
ELA Extension: Human Robot
Pair students up so that one English Learner (EL) works with one other student who is a non-EL or a higher-level EL.
One student will be the robot, and the other will be the programmer during each round. The programmer will need to create detailed instructions for the robot, but the catch is it must be in the language they are not proficient in.
Demonstrate by being very explicit in following their exact instructions, i.e., if they say to raise your arm to pick up a mug, raise it over your head. Students will then realize it should be more detailed in that you should raise your arm 45 degrees, 1 inch, etc.
Once students have written their instructions, have them test out the code and instruct the “robots” to make notes of words or phrases they are unsure of. The programmer will then update their “firmware” with the knowledge of the missing language.
Repeat the activity with roles reversed and follow the same instructions.
At the end, have students write a one paragraph reflection on all or one of the following prompts: What did you find the most difficult? What would you change if you did this activity again? What did you enjoy the most from this activity? Have them explain why on each one.
Math Extension: Beats per Minute
In Step 4 of Walker Dance, Pip introduces the song by the Bee Gees called “Stayin’ Alive,” which has a tempo of 103 beats per minute.
Discuss with students that songs have different tempos, and tempos are measured in beats per minute (or BPM). BPM indicates the number of beats that occur during one minute of the tune. For instance, a tempo of 60 BPM would mean a beat sounds exactly once per second. Here is a video to show students how BPM works: BPM explained in less than a minute! What would you like us to explain in our upcoming videos?
Play the Bee Gee’s song “Stayin’ Alive.” Have the students go back into the programming of their Robotic Walker and change their wait times to match the beats per minute of the song. Bee Gees - Stayin’ Alive (Official Music Video)
Have the students discuss how their wait times would need to be changed if the song is half the speed (BPM) of the song Stayin’ Alive.
Now, select and play a slower song that is 50 BPM, or use the example linked here. Play “Open Arms” by Journey for students: Journey - Open Arms (Official Audio)
Students should now go back to their Robotic Walker programming and adjust their wait times so that the Robotic Walker dances to the tempo of this new song.
With students, discuss how their wait times changed when changing from a 103 BPM song to a 50 BPM song. What is the correlation, and how would they write that in a formula? Show a formula example and break it down.
Career Connections
Robotics Engineer: Salary $104,600/yr
Automotive Engineer: Salary $95,300/yr
Civil Engineer: Salary $88,050/yr
Electro-Mechanical and Mechtronics Technicians: Salary $60,570/yr
 Computer with USB port and Chrome or Edge browser
Computer with USB port and Chrome or Edge browser
 Piper Make Base Station or Starter Kit
Piper Make Base Station or Starter Kit
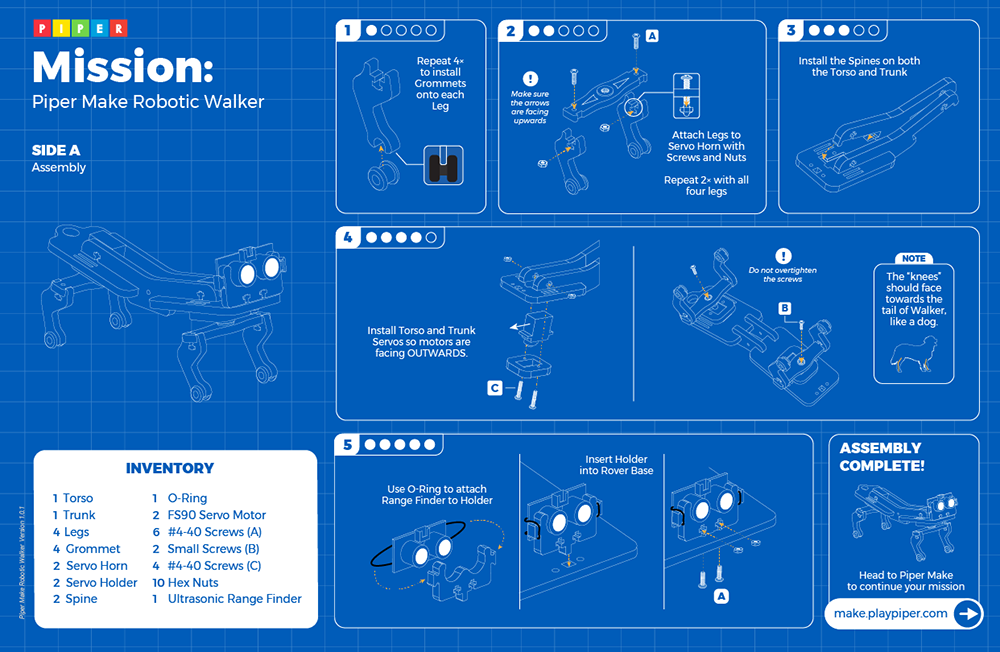
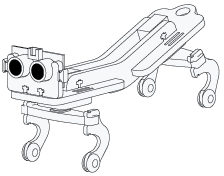 Piper Make Walker
Piper Make Walker
 Robotics Engineer: Salary $104,600/yr
Robotics Engineer: Salary $104,600/yr
 Automotive Engineer: Salary $95,300/yr
Automotive Engineer: Salary $95,300/yr
 Civil Engineer: Salary $88,050/yr
Civil Engineer: Salary $88,050/yr
 Electro-Mechanical and Mechtronics Technicians: Salary $60,570/yr
Electro-Mechanical and Mechtronics Technicians: Salary $60,570/yr